机器人插入的针头和导管
芬欧梅隆大学的研究人员参与了一种机械臂的设计,用于在微创手术过程中精确引导针、导管和手术器械的插入。
该机器人具有混合动力应变结构,可以实现精确、重复、计划和控制的插入,增强了目前使用的程序。此外,它的成本较低,需要短时间的学习。该设计已经获得专利,是马德里大学Politécnica de Madrid (UPM)工业工程师高中(UPM)和Gliatech S.L公司的研究人员联合合作的结果。
这些引导手术、针头插入、导管和支架的程序用于提取液体和组织样本,以进行活检和诊断。该机器人可以进行精确和可控的插入、沉积标记和特定的药物管理。多亏了虚拟规划,这一切都是可能的,这是基于之前用扫描仪捕获的医学图像的分析。
外科手术用机器人的发展是提高手术效果的需要的结果。基于自动化和机器人技术的技术可以提高这一效率,因为它们能够集成不同的信息源,例如医学图像以及它们的处理,以及执行实时复杂的任务。
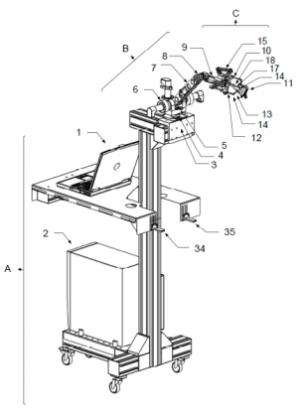
该专利机器人装置具有六自由度的混合动力系统结构,利用串联和并联机构的特点,其结构是专门设计用于执行引导和插入任务的。此外,它还有一个带有激光和惯性单元的系统,可以让医生校准和纠正患者的位置和方向手术器械.
这些手术器械通过使用耦合装置连接到机构的远端,该耦合装置可以根据插入任务是由自动机器人(主动)完成还是由机器人手动引导的专家(被动)完成而解耦。
所提供的马德里大学Politécnica
引用:机器人插入的针头和导管(2013年12月2日)检索到2022年12月19日从//www.pyrotek-europe.com/news/2013-12-robot-inserted-needles-catheters.html
这份文件受版权保护。除为私人学习或研究目的而进行的公平交易外,未经书面许可,不得转载任何部分。内容仅供参考之用。



















