妇科医生在具有触觉反馈的创新模拟器上实践微创宫腔镜
 for the trainee to see. Credit: Vladimir Poliakov et al./IEEE Transactions on Medical Robotics and Bionics.")
来自Skoltech和KU Leuven的研究人员开发了一种具有触觉反馈的妇科训练模拟器,用于办公室宫腔镜检查。这种门诊诊断程序包括用内窥镜检查子宫内部,内窥镜通过宫颈引入,没有或使用局部麻醉,没有任何其他医疗器械。
提出了IEEE医学机器人与仿生学汇刊在美国,该解决方案旨在缩小妇科医生培训方面的差距,将这种差距降到最低程度侵入性程序在不需要进行宫腔镜检查的情况下,宫腔镜被广泛应用。
宫腔镜是一种医疗程序用于诊断宫内病变,有时做小手术,如息肉切除,通过阴道和子宫颈插入一根称为宫腔镜的细管。宫腔镜携带一个相机,较厚的宫腔镜可以在空心管中容纳一个用于小手术操作的工具。
如果操作得当,这种门诊手术带来的不适和不便要比在医院手术室进行全身麻醉、宫颈管扩张和可能的其他子宫操作少得多。
该研究的主要作者,Skoltech博士生Vladimir Poliakov评论说:“尽管对患者有许多明显的优势,但在住院环境中进行宫腔镜对医疗专业人员构成了严重的挑战。”“妇科医生必须实时监测患者的不适程度,小心地引导内窥镜穿过阴道,这是特别困难的——扩张的宫颈狭窄弯曲的解剖结构,所有这些都不需要使用窥镜或其他额外的仪器。”
由于缺乏足够的培训平台来锻炼这一专业要求高的程序所需的技能,诊所倾向于支持住院宫腔镜,因为它更容易执行,并且有可用的培训系统。这意味着患者不得不在医院接受侵入性更强的手术,而不是快速与妇科医生预约,即使这是可以避免的。
“通过提出我们的模拟器,我和我的同事试图填补训练经验的真空,最终将侵入性和患者的不适降至最低,”Poliakov继续说道。“据我们所知,我们的第一个原型机还没有具有触觉反馈的商业类似物。”
在设计训练系统时,研究人员以在宫腔镜医生中进行的民意调查结果为指导,他们指出了反馈的重要性,并强调了程序的关键方面——因此模拟器的基本自由度。
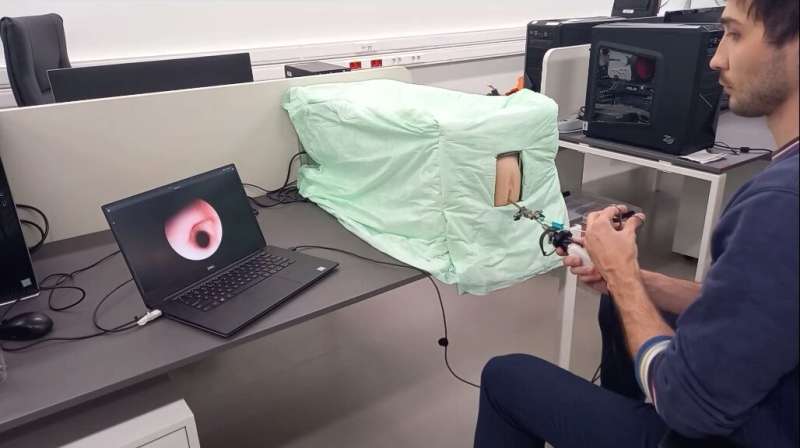
训练系统包括一个硅胶假阴道和一套宫腔镜工具:学员用一只手插入内窥镜,用另一只手控制内置的钳。练习包括在模拟中寻找和收集分散在子宫腔周围的点。这使学生能够通过颈椎管,这可以说是最重要的技能,同时还练习双手协调操作。
练习宫腔镜的另一端连接到一个触觉接口,Force Dimension的高精度Omega.7机器人,它提供触觉反馈.计算机显示来自内窥镜相机的视觉输入,根据工具与虚拟子宫模型的交互模拟实时生成图像。
该团队在17日验证了其训练系统测试对象根据他们之前宫腔镜检查的经验被分配到三个组:初学者,中级水平的从业者和专家。受试者在测试中的分数足以将他们相对可靠地分为最初概述的三个熟练程度组。“更重要的是,我们发现初学者在五次尝试后,六项指标中的五项得分都有所提高。这使我们得出结论,该设备具有培养办公室宫腔镜所需技能的潜力。”
智能空间机器人Skoltech实验室的负责人、数字工程中心的副教授Dzmitry Tsetserukou是这项研究的合著者,他补充说:“子宫颈镜和宫腔镜是诊断女性生殖系统的基本方法。它们被广泛应用于现代诊所,比如位于斯科尔科沃的以色列健康中心莫斯科哈大沙医疗中心。然而,目前市场上没有现代培训系统,可以提供使用该仪器的实际经验。
“我们不仅设法以逼真的方式再现视觉反馈,而且还确保受训者有通过宫腔镜通过宫颈管的触觉感知。我们的解决方案在欧洲和俄罗斯市场上有很大的商业化潜力,诊所对这项技术表现出很大的兴趣。这个项目的成功很大程度上要归功于鲁汶大学的Emmanuel Vander Poorten教授,他是欧洲医疗机器人领域的领先专家之一。”



















